


OctaGrabber Compendium
Last Updated: March 20, 2021
(changelog)
A unique robot, dubbed “OctaGrabber”, was first spotted in March 2017 when it was photographed aboard the droneship Of Course Of Still Love You (OCISLY) where it serves to this day.

First photo of OctaGrabber aboard OCISLY in March 2017 (Credit: Stephen Marr)
Elon Musk later explained that the robot is used to stabilize the Falcon 9 and Falcon Heavy rockets after landing on the Autonomous Spaceport Droneship (ASDS) to prevent them from sliding around the deck in choppy seas. For example, during the Thaicom-8 mission, the sea was so choppy that the rocket slid across the deck before it could be tied down, and the only thing that prevented it from sliding off the droneship was a lip around the deck:
Additionally, using the robot to secure the rocket is safer than tying it down manually. Normally, the SpaceX personnel boards the platform as soon as possible after landing and buttresses the rocket up with jacks to take some of the weight away from the composite landing legs. Subsequently, metal stoppers are welded to the deck beneath the rocket, and the rocket is basically tied down with chains that attach to the heavy Octaweb (the sturdy structure that houses the engines at the bottom of the rocket).

Manually secured rocket after landing (Credit: Teslarati)
According to SpaceX president Gwynne Shotwell, the robot is officially dubbed OctaGrabber. It is assumed to be remote-controlled and running on electricity supplied by a cable. Currently, there is no video of the robot in action, but the available information gives us a good idea of how it works. When a rocket booster is landing, the robot is hidden away in a safe place on the ASDS (sometimes called a garage) so it does not get damaged by the rocket’s exhaust or by an explosion in the event of an unsuccessful landing.


However, if the landing is successful, SpaceX workers can presumably control the robot equipped with tank treads remotely from a nearby ship and drive it directly under the landed rocket. Subsequently, the robot lifts four hydraulic jacks, grabs the rocket, and thus secures it against inadvertent slipping during the ASDS’s voyage back to port. In addition to saving time, the big advantage this robot provides, is that the SpaceX personnel is safe on another ship while the rocket is secured, so the risk of injury is significantly reduced compared to securing the rocket manually.
A quick video of #octagrabber being moved towards its garage. First time I’ve ever actually seen it move. pic.twitter.com/cksLFmX2Ww
— Stephen Marr (@spacecoast_stve) March 5, 2019
You might wonder how can this relatively small robot actually prevent such a big rocket from sliding. Remember:
- The rocket is mostly hollow and almost empty after landing as almost all fuel had been used to launch and land. After landing, the rocket weighs only about 25 tons.
- The rocket has a very low center of gravity, as almost all of its weight is concentrated at the bottom of the rocket where the heavy engines are
- The robot is pretty large and heavy (it’s hard to tell from the photos but OCISLY is the size of a football field)
- The combination of the robot’s weight, low center of gravity, increased traction provided by the treads and large contact area (compared to the small contact area between the deck and Falcon’s landing legs) results in a sufficiently secure fit



OctaGrabber was first used in June 2017 during the BulgariaSat-1 mission when it supported the landed stage on its way back to port. The robot was then supposed to be used again on the SES-11 mission 4 months later, but there was a small fire onboard after landing which resulted in the robot being damaged. All the circumstances of the fire are not known, but according to NASA Spaceflight, a portion of the remaining RP-1 fuel from the rocket had leaked after landing which has subsequently accumulated near the containers at the back of the ASDS. Then it ignited, supposedly as a result of an automatic safing procedure in which the landed rocket burns off the remaining pyrophoric substance TEA-TEB used to ignite the engines. The water hoses on deck extinguished the fire quickly, but not before it engulfed the “garage” in which OctaGrabber was stored. The robot was damaged as a result and then had to spend several months in Port Canaveral being repaired. It was finally used again in April 2018 during the TESS mission.

Remote-controlled robot OctaGrabber aboard OCISLY before the Nusantara Satu launch in February 2019 (Credit: Teslarati)
Currently, OctaGrabber is only compatible with Falcon 9, which proved fatal to the Falcon Heavy center core during the Arabsat 6A mission in April 2019. Although the booster successfully landed on OCISLY, bad weather prevented the crew from securing it to the deck. Rough sea conditions then damaged the booster after it tipped over. Falcon Heavy center core has different mechanical interface from Falcon 9, but OctaGrabber was to be upgraded for Falcon Heavy in time for the STP-2 launch, according to Spaceflight Now. That was confirmed by photos taken prior to STP-2 which showed that OctaGrabber had different-looking arms. However, the STP-2 center core didn’t manage to land on OCISLY so OctaGrabber wasn’t used during that mission.

Upgraded OctaGrabber prior to STP-2 in June 2019 (Credit: Julia Bergeron)
SpaceX has had only one such robot for a long time and it served on the droneship Of Course I Still Love You in Florida. However, the company has been working on a new robot that would be used on the other droneship Just Read the Instructions. The new robot has been photographed in SpaceX’s Cocoa facility in Florida and new treads were spotted in Port Canaveral. Just Read the Instructions has been undergoing upgrades there and has been modified to include a garage for the new robot. „OctaGrabber 2“ was first spotted aboard JRTI in May 2020 and was first used on the Starlink v1-7 launch.
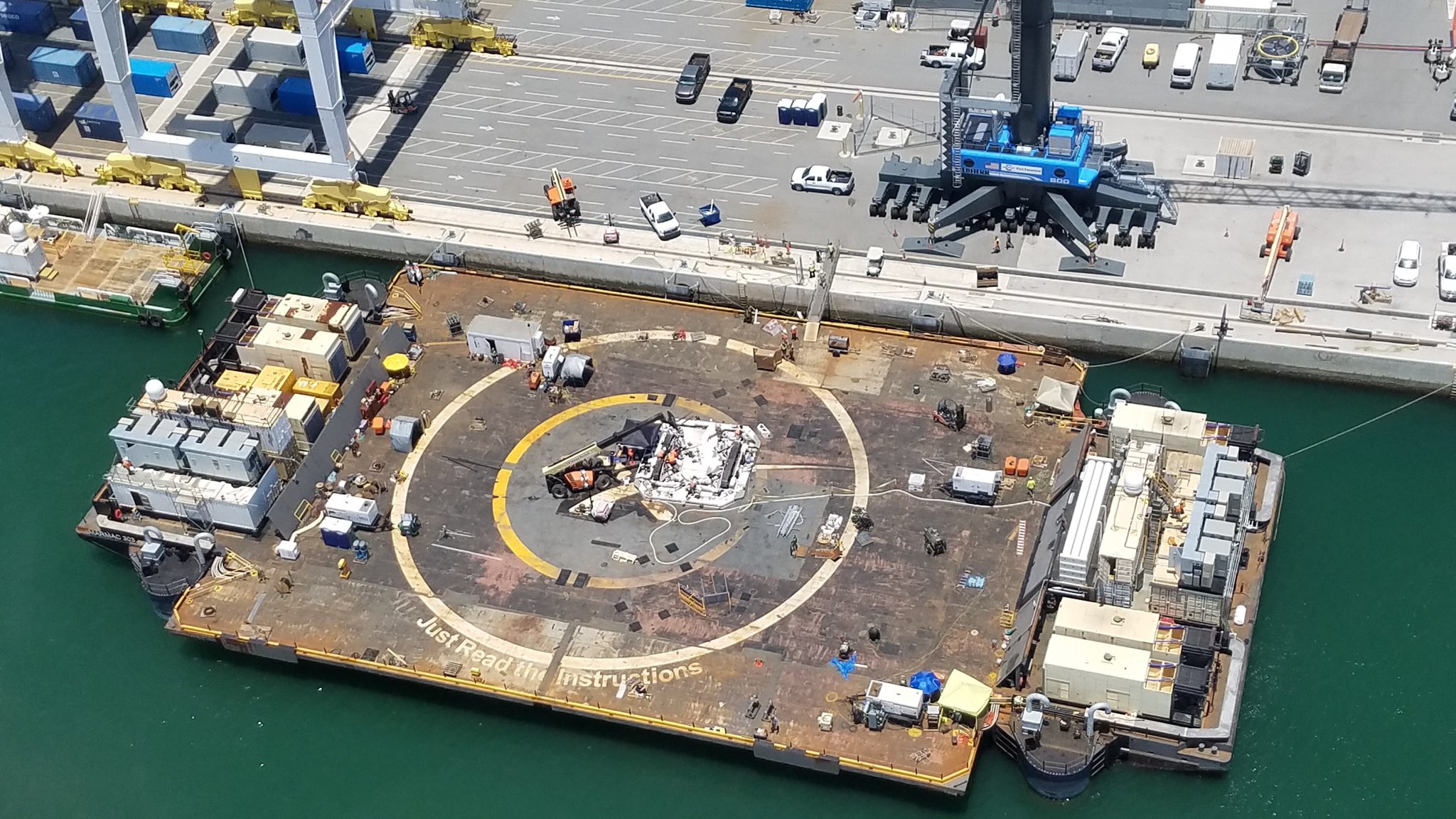
Second robot on the deck of JRTI in May 2020 (Credit: @KimptonColorado)
The new robot looks just like the old OctaGrabber, so it was expected to function exactly the same, but SpaceX manage to surprise and confuse fans a bit. After the first stage of Falcon 9 sent Crew Dragon and astronauts into orbit during the DM-2 mission, it landed on droneship OCISLY where it was secured by the original OctaGrabber. A few days later, the droneship returned to Port Canaveral but the robot supporting the booster looked a little different than what we were used to. So there was speculation that OCISLY actually got the new robot and the older OctaGrabber was reassigned to the recently-upgraded droneship JRTI. But it later turned out that the old OctaGrabber was just upgraded to match the new robot. See comparison:


These upgrades seemed to have enabled a new way of handling the booster after a droneship brings it back after landing. During all previous missions, SpaceX always first moved the recovered booster with a crane to a stand on land, and only then did technicians start retracting the landing legs. However, during the DM-2 mission, this process was accelerated. The crane first put a cap on the booster while it was still standing on OCISLY’s deck. The cap is equipped with ropes designed to retract the landing legs. But then the crane disconnected itself and the technicians began to retract the legs one by one, while the booster was still standing on OCISLY. Eventually, all four legs were retracted, at which point the booster was only supported by OctaGrabber. After that, the booster was lowered onto a road transporter directly from OCISLY using cranes, and then was taken for further processing. SpaceX saved a few steps and the whole process took only about half a day. In contrast, the earlier method usually took 2–4 days.
Supertelephoto time-lapse of Octagrabber on board the 'Of Course I Still Love You' droneship releasing #Falcon9 #B1060.2 🚀
This is a short clip from my 8K video of this recovery. Check out the full video here:
🎥 https://t.co/eW9B6g9Bh1 pic.twitter.com/R8PyQGx716— 📸Trevor Mahlmann (@TrevorMahlmann) September 13, 2020
In March 2021, a third OctaGrabber robot was spotted in the SpaceX facility in Cocoa, Florida. It is assumed it will be used on a future droneship A Shortfall of Gravitas, but that hasn’t been confirmed yet.
A third Octagrabber robot has been spotted under construction at SpaceX's Cidco Rd facility!
I wonder if there is a third droneship on the way? 🤔 #ASOGWen
Thank you to Lab Propulsion Systems for the photo: https://t.co/yTvzR1v3ib pic.twitter.com/EsPxtaaqwU
— Gavin Cornwell (@SpaceXFleet) March 19, 2021
Changelog:
- Mar 20, 2021 – Added information about a new OctaGrabber that was spotted in Cocoa and might be used on a third droneship
- Feb 7, 2021 – I’ve decided to remove the list of missions during which the robots were used because it’s not that interesting (more interesting are the mission where OctaGrabber wasn’t used and those are detailed in the main text)
- Jun 16, 2020 – Added more information about the second robot
- May 24, 2020 – Updated information about the second robot
- Mar 21, 2020 – Added information about a second robot being built in Florida
- Jun 26, 2019 – Added photos of OctaGrabber with Falcon Heavy upgrades
- Apr 16, 2019 – Updated with information about OctaGrabber not being compatible with Falcon Heavy
- Mar 23, 2019 – Article first published







Small correction to be made: In the paragraph about the fire, the following sentence needs to be corrected to past tense:
“All the circumstances of the fire are not known, but according to NASA Spaceflight, a portion of the remaining RP-1 fuel from the rocket has leaked after landing which has subsequently accumulated near the containers at the back of the ASDS.”
“Has” should be replaced with “had,” to stay in agreement with the preceding and following sentences which are in past tense.
Otherwise a great article!
Thanks, I changed it to “had leaked”.
Many thanks for the great overview. This little but strong guy really deserves more attention!
You’re welcome. 🙂
Great info! Really like the animation.
Any idea what the size and weight of the octagrabber is? I can’t seem to find specific numbers.
I don’t think we’ll ever know its weight unless SpaceX shares that information with us. Size should be deducable from photos, so maybe somebody could try to calculate it and then I can add it to the article.
There’s a tiny typo in the fourth paragraph. “unsuccesful” is missing an “s”.
What a cool resource this website is!
Thank you, it’s been fixed.
Statement “…large contact area in octagrabber results in secure fit” is false. The science of physics teaches that friction force is independent of friction area.